動吸振器

振り子型動吸振器の模擬アニメーション
真ん中の黄色の丸:質量体
上部の灰色の線:吊り
下部の緑の足:ダンパ
外側の青の枠:制振対象物
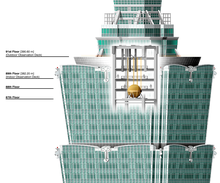
台湾の台北101に設置されている振り子型動吸振器配置図
動吸振器(どうきゅうしんき、dynamic vibration absorber、DVA)またはダイナミックダンパ(dynamic damper)とは、振動する対象物に、補助的な質量体をばねなどを介して付加することにより、対象物の固有振動数周辺での共振現象を抑制する装置のことである[1]。端的には、補助質量体が対象物の振動を肩代わりして振動することで、対象物が振動しないようにする装置である[2]。
振動抑制技術のうち最も基本的なものの一つであり、機械をはじめ建築、土木などの分野でも用いられる。同調質量ダンパ(チューンドマスダンパ、Tuned Mass Damper、TMD)や質量ダンパ(マスダンパ、Mass Damper)などとも呼ばれる。
1883年にP・ワッツ(P. Watts)に考案され[3]、1909年にハーマン・フラーム(Hermann Frahm)により最初に特許出願された[4]。
目次
1 概要
2 基礎理論
2.1 非減衰動吸振器
2.2 減衰付動吸振器
2.2.1 定点理論
2.2.2 最小分散規範
2.3 減衰付主系・減衰付動吸振器
2.3.1 近似式
3 動吸振器の種類
3.1 同調質量ダンパ
3.2 同調液体ダンパ(スロッシングダンパ)
3.3 フードダンパ
3.4 ランチェスターダンパ(摩擦ダンパ)
3.5 インパクトダンパ(衝撃ダンパ)
3.6 アクティブ動吸振器
4 脚注
5 参考文献
6 関連項目
7 外部リンク
概要
機械や建造物に振動が発生するとき、多くの場合で振動が害をなすので振動を抑制したい。特に、振動を発生させる力の振動数と対象物の固有振動数が近い場合、共振が発生して大きな振動が発生する(強制振動なども参照)。これを避けるためには対象物の固有振動数を変更するなどの適切な振動特性を対象物に与える必要がある。しかし実際の機械や建造物の設計では、種々の制約条件により対象物自体の特性を都合良く変更することができないことも多い。このようなときに、対象物に補助的な質量体を取り付け、この質量体に対象物の振動を吸収させて代わりに振動させることで対象物の振動抑制を図るのが動吸振器である。建造物における設計思想の「耐震」・「制振」・「免震」の内、「制振」に分類される装置に該当する[5]。
基礎理論
非減衰動吸振器

主系・従系バネのみの最も単純なモデル、主系が加振力f(t)を受ける場合。図中において、kはバネ定数、mは質量、xはバネの自然長(つり合いの位置)からの変位、tは時刻をそれぞれ表す変数、m、aは主系、従系を表す添え字である。
最も単純な減衰の無い2自由度系の線形ばね質量系について考える。バネkmで支えられた質量mmからなる主系(制振対象)に、バネkaと質量maからなる従系(動吸振器)が取り付けられたモデルが、動吸振器の最も単純なモデルとなる。このモデルでは、2つの質量は質点(ある一点に質量が集中している)とし、バネの重さは考えない。質点mm、maの変位(バネkm、kaがともにつり合っている位置からの移動量)をそれぞれxm、xaと表すこととし、時刻をtとおくと、主系が力振幅f0、角振動数Ωの調和振動形の加振力を受けるとき、運動方程式は以下のようになる[6]。
- mmx¨m+kmxm+ka(xm−xa)=f0cos(Ωt){displaystyle m_{m}{ddot {x}}_{m}+k_{m}x_{m}+k_{a}(x_{m}-x_{a})=f_{0}cos(Omega t)}
- max¨a+ka(xa−xm)=0{displaystyle m_{a}{ddot {x}}_{a}+k_{a}(x_{a}-x_{m})=0}


この系全体としての固有振動数ω1、ω2は次のように求まる。
- (ω1ω2)=ωm2+(μ+1)ωa2∓[ωm2+(μ−1)ωa2]2+4μωa42{displaystyle {dbinom {omega _{1}}{omega _{2}}}={sqrt {frac {omega _{m}^{2}+(mu +1)omega _{a}^{2}mp {sqrt {left[omega _{m}^{2}+(mu -1)omega _{a}^{2}right]^{2}+4mu omega _{a}^{4}}}}{2}}}}
![dbinom{omega_1}{omega_2} = sqrt{ frac{ omega_m^2 + (mu + 1) omega_a^2 mp sqrt{ left[ omega_m^2 + (mu - 1) omega_a^2 right]^2 + 4mu omega_a^4 } }{2} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/25ca4ce321901331d495ccd2ffffdf9b11bcf643)
ここで、
- ωa=kama,ωm=kmmm,μ=mamm{displaystyle omega _{a}={sqrt {frac {k_{a}}{m_{a}}}},qquad omega _{m}={sqrt {frac {k_{m}}{m_{m}}}},qquad mu ={frac {m_{a}}{m_{m}}}}

である。このとき各質点の振幅倍率は以下のように得られる。
- Xmxst=ωm2(ωa−Ω2)(ω12−Ω2)(ω22−Ω2){displaystyle {frac {X_{m}}{x_{st}}}={frac {omega _{m}^{2}(omega _{a}-Omega ^{2})}{(omega _{1}^{2}-Omega ^{2})(omega _{2}^{2}-Omega ^{2})}}}
- Xaxst=ωm2ωa2(ω12−Ω2)(ω22−Ω2){displaystyle {frac {X_{a}}{x_{st}}}={frac {omega _{m}^{2}omega _{a}^{2}}{(omega _{1}^{2}-Omega ^{2})(omega _{2}^{2}-Omega ^{2})}}}



非減衰主系非減衰動吸振器の共振曲線、質量比を変化させた場合
縦軸:主系の振幅倍率の絶対値、横軸:加振力振動数・従系単体固有振動数比
ここで、Xm/xstの式に注目すると、ωa = Ωのとき、Xm/xst = 0となる。すなわち加振力の振動数Ωが既知のとき、動吸振器の単体固有角振動数ωaをΩと一致させるように設計することで、主系の振動を完全に消失させることができる[6]。このような手法を同調(tuning)とよぶ[6]。このように補助質量体に主系の振動を吸収させるが動吸振器の基本原理である。このように、連結された振動系で1つの振動系の振動が極小になることを反共振とよぶ。
また、ωa = Ωのときの従系質量体の振動変位の解[6]は、
- xa=f0kacos(Ωt+π){displaystyle x_{a}={frac {f_{0}}{k_{a}}}cos(Omega t+pi )}

となり、振幅f0 / kaで、位相は加振力と180°ずれて振動する。さらに、このときの従系質量体がバネを通じて主系質量体へ及ぼす力Faは、xm = 0なので、
- Fa=−ka(xm−xa)=f0cos(Ωt+π)=−f0cos(Ωt){displaystyle F_{a}=-k_{a}(x_{m}-x_{a})=f_{0}cos(Omega t+pi )=-f_{0}cos(Omega t)}

となり、加振力を完全に打ち消すような力が、従系から主系へ加わっていることがわかる[7]。
以上のように、理論上はωaをΩと一致させるように設計すれば主系の振動を0にできるが、実際にはΩが一定値に限定できる場合は少ない。共振曲線を見ると、Ω/ωa=1の反共振点のすぐそばにω1、ω2による共振点が存在する。すなわち、Ωが反共振点から変動すると振幅はすぐに大きくなる傾向がある。一方、主系・従系質量比μ = ma/mmに注目すると、μが大きいほど(=従系質量が主系質量に近いほど)、反共振点から離れても振幅倍率の立ち上がりが緩やかである。振動抑制の観点からは、このように主系・従系質量比を大きく取る方が都合が良いが、実際の設計ではそのような大きな動吸振器を付けることは通常は制約がある[8]。このような欠点を解決するため、下記の減衰付動吸振器が有用となる。
減衰付動吸振器

主系バネのみ、従系バネ・減衰有りのモデル、主系が加振力f(t)を受ける場合。図中において、kはバネ定数、cは減衰定数、mは質量、xはバネの自然長(つり合いの位置)からの変位、tは時刻をそれぞれ表す変数、m、aは主系、従系を表す添え字である。
減衰の無いモデルの動吸振器では、加振力の振動数と動吸振器の単体固有角振動数が一致または狭い範囲で近くないと効果を発揮できない。減衰のある動吸振器では、比較的広い範囲に加振力の振動数が変動する場合でも、主系の振動を吸収することが可能となる。1909年にフラームにより考案された動吸振器は減衰が無い単純なものであった[4]。その後に研究が進み、1928年、J・オーモンドロイド(J. Ormondroyd)とデン・ハートッグ(en:Jacob Pieter Den Hartog)により減衰付きの動吸振器の基礎理論が与えられた[4]。
バネkmで支えられた質量mmからなる主系(制振対象)に、バネka、減衰器caと質量maからなる従系(動吸振器)が取り付けられたモデルを考える。減衰器がないモデルと同様に、各質点の変位をx、時刻をtとおくと、この運動方程式は以下のようになる[9]。
- mmx¨m+kmxm+ca(x˙m−x˙a)+ka(xm−xa)=f0eiΩt{displaystyle m_{m}{ddot {x}}_{m}+k_{m}x_{m}+c_{a}({dot {x}}_{m}-{dot {x}}_{a})+k_{a}(x_{m}-x_{a})=f_{0}e^{iOmega t}}
- max¨a+ca(x˙a−x˙m)+ka(xa−xm)=0{displaystyle m_{a}{ddot {x}}_{a}+c_{a}({dot {x}}_{a}-{dot {x}}_{m})+k_{a}(x_{a}-x_{m})=0}


この運動方程式より、主系の変位倍率は次のように求まる[9]。
- |Xmxst|=(α2−β2)2+(2ζaαβ)2[(α2−β2)(1−β2)−μα2β2]2+(2ζaαβ)2(1−β2−μβ2)2{displaystyle left|{frac {X_{m}}{x_{st}}}rightvert ={sqrt {frac {(alpha ^{2}-beta ^{2})^{2}+(2zeta _{a}alpha beta )^{2}}{left[(alpha ^{2}-beta ^{2})(1-beta ^{2})-mu alpha ^{2}beta ^{2}right]^{2}+(2zeta _{a}alpha beta )^{2}(1-beta ^{2}-mu beta ^{2})^{2}}}}}
![left| frac{X_m}{x_{st}} rightvert = sqrt{ frac{ (alpha^2 - beta^2)^2 + (2 zeta_a alpha beta)^2}{ left[ (alpha^2 - beta^2)(1 - beta^2) - mu alpha^2 beta^2 right]^2 + (2 zeta_a alpha beta)^2 (1-beta^2 - mu beta^2)^2 }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5145a785ab8610995aab63a2094912a5a68531e)
ここで、
- ωa=kama, ωm=kmmm, μ=mamm, α=ωaωm, β=Ωωm, cca=2maka, ζa=cacca, xst=f0km{displaystyle omega _{a}={sqrt {frac {k_{a}}{m_{a}}}}, omega _{m}={sqrt {frac {k_{m}}{m_{m}}}}, mu ={frac {m_{a}}{m_{m}}}, alpha ={frac {omega _{a}}{omega _{m}}}, beta ={frac {Omega }{omega _{m}}}, c_{ca}=2{sqrt {m_{a}k_{a}}}, zeta _{a}={frac {c_{a}}{c_{ca}}}, x_{st}={frac {f_{0}}{k_{m}}}}

である。
減衰比ζaを変化させていくと、ζa → 0のときは、上記の非減衰モデルに一致し、ζa → ∞のときは、主系と従系は一体にふるまい、質量m = ma + mm、バネ定数k = kmの1自由度系のモデルに一致する[10]。すなわち、ζa → 0でも、ζa → ∞でも、共振点で振幅が無限大に発散することになる[11]。よって減衰を付与する場合、単純に大きな減衰を与えれば振動を低減できるというわけではなく、大き過ぎない小さ過ぎない、最適な減衰の値を与える必要がある[11]。そのための設計手法として、下記の定点理論と最小分散規範などがある。
定点理論

非減衰主系減衰付動吸振器の共振曲線
縦軸:主系の振幅倍率、横軸:加振力振動数・主系単体固有振動数比
減衰比の変化にかかわらず定点(P、Q)が存在する

ブロックらの定点理論による最適結果の例
今、従系(動吸振器)の減衰特性を変化させていくことにより、主系の変位倍率がそれに連れてどのように変化するかに注目する。主系と従系の質量比μ、主系と従系の単体固有角振動数比αを固定し、従系の減衰比ζaを変化させて変位倍率Xm/xstの変化を見ると、ある2つの主系単体固有角振動数と加振力振動数の比βの値で、ζaに無関係にXm/xstの値が定まる2つの点(P、Q)がある。これらの点を定点(fixed point)と呼ぶ[9]。βの代わりにΩ/ωaの値で変化を見たときも同様である[10]。
減衰の無い動吸振器では、加振力の振動数と動吸振器の単体固有角振動数が一致または狭い範囲で近くないと効果を発揮できないので、減衰を付与することで幅広い範囲で振動(振幅倍率)を抑えるようにしたい。上記の定点が存在する性質を利用して動吸振器特性の最適化を図るのが、動吸振器の定点理論である。定点理論は、1932年のエーリッヒ・ハンカム (Erich Hahnkamm)の研究に始まり、1946年にJ・E・ブロック(J. E. Brock)によってほぼ完成された[4]。振幅倍率の共振曲線が全体的に低く抑えられるような曲線になればよいので、次の2つの条件を満たせば、そのような曲線が得られることが予想される[10]。
- 共振曲線で、2つの定点が同じ値を取る。
- 共振曲線で、2つの定点が極大値を取る。
後者の操作は定点を共振点と一致させることと同義でもある。具体的には、主系と従系の質量比μより以下のような最適値が求まる[12]。
αopt=11+μ{displaystyle alpha _{opt}={frac {1}{1+mu }}}(条件1より)
ζa opt=3μ8(1+μ){displaystyle zeta _{a opt}={sqrt {frac {3mu }{8(1+mu )}}}}(条件2より)


以上のような、最適な主系・従系質量比αoptを求めることを最適同調、最適な従系減衰比ζa optを求めることを最適減衰とよぶ[13]。最適同調の式はエーリッヒ・ハンカムにより導出され、最適減衰の式はブロックにより導出された[4]。
上記の最適減衰の式は厳密解ではなく、平均に基づく近似値である[14]。ただしμ ≪ 1と見なせる限り、実用上は特に問題ない。誤差が生じる原因は、P点の最適減衰によると、右側の共振点がQ点からわずかにずれ、同様に、Q点の最適減衰では、左側の共振点がP点からずれるためで、定点理論はP点、Q点での最適減衰を平均化して結果としている。西原らの厳密解との比較によると、μ = 0.1のとき相対差0.023%、μ = 1のとき相対差0.5%、μ = 10のとき相対差2.3%である[15]。西原らによる最適減衰の厳密解を以下に示す[16]。
- zopt=αopt2(1−ropt)[ropt−(1+μ)αopt2]2ropt[(1+μ)2αopt2−ropt]{displaystyle z_{opt}={sqrt {frac {alpha _{opt}^{2}(1-r_{opt})left[r_{opt}-(1+mu )alpha _{opt}^{2}right]}{2r_{opt}left[(1+mu )^{2}alpha _{opt}^{2}-r_{opt}right]}}}}
- αopt=ropt(1+4+3μ)3(1+μ)2{displaystyle alpha _{opt}={sqrt {frac {r_{opt}(1+{sqrt {4+3mu }})}{3(1+mu )^{2}}}}}
![z_{opt} = sqrt{ frac{ alpha_{opt}^2(1 - r_{opt}) left[ r_{opt} - (1 + mu) alpha_{opt}^2 right] }{ 2 r_{opt} left[ (1+mu)^2 alpha_{opt}^2 - r_{opt} right] } }](https://wikimedia.org/api/rest_v1/media/math/render/svg/d52ff4d9e0b59bcf1e1515a3416ed2ab077c4366)

ここで、
- z=ca2μmmkm=αζa{displaystyle z={frac {c_{a}}{2mu {sqrt {m_{m}k_{m}}}}}=alpha zeta _{a}}
- ropt=8[(4+3μ)3/2−μ]64+80μ+27μ2{displaystyle r_{opt}={frac {8left[(4+3mu )^{3/2}-mu right]}{64+80mu +27mu ^{2}}}}

![r_{opt} = frac{8 left[ (4+3mu)^{3/2}-mu right] }{ 64+80mu+27mu^2 }](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfd441d031b59f33506369af6cb1f58d01c64bd0)
最小分散規範

最小分散規範(赤)と定点理論(青)の比較例
定点理論の方が最大値は低いが、最小分散規範の方が全体的に倍率が低い
非常に不規則な励振を受けるなどの場合は、特定の励振周波数近辺よりも、すべての周波数域で振動が最少となるように設計した方がよい[12]。このような設計手法として、最小分散規範と呼ばれる最適化法がある。最小分散規範は、1963年にステファン・H・クランドル(Stephen H. Crandall)とウィリアム・D・マーク(William D. Mark)により発表された
[17]。
最小分散規範では、伝達される振動エネルギーに注目して、これが最少となるように設計する。すなわち、共振曲線を積分して得られる面積二乗値が最少となるようにする[12]。具体的には、主系の基礎部がホワイトノイズランダム振動を行う場合は、主系と従系の質量比μより以下のような最適値が求まる[18]。
- αopt=11+μ2+μ2{displaystyle alpha _{opt}={frac {1}{1+mu }}{sqrt {frac {2+mu }{2}}}}
- ζa opt=μ(4+3μ)8(1+μ)(2+μ){displaystyle zeta _{a opt}={sqrt {frac {mu (4+3mu )}{8(1+mu )(2+mu )}}}}


上記の通り、定点理論と異なり2つの共振点の高さは一致せず、常に曲線上左側(周波数が低い側)の共振点が、曲線上右側(周波数が高い側)の共振点よりも大きくなる特徴がある[19]。
減衰付主系・減衰付動吸振器
 |  | |
主系、従系ともにバネ・減衰有りのモデル、主系が加振力を受ける場合 | 主系、従系ともにバネ・減衰有りのモデル、基礎が振動変位する場合 |
より一般的な、主系にも減衰がある場合を考える。バネkm、減衰器cmで基礎に支えられた質量mmからなる主系(制振対象)に、バネka、減衰器caと質量maからなる従系(動吸振器)が取り付けられたモデルの運動方程式は、主系に対して力励振f(t)が加わる場合と基礎に対して変位励振x0(t)が発生する場合、それぞれで以下のようになる。
主系に対して力励振f(t)が加わる場合:
- mmx¨m+cmx˙m+kmxm+ca(x˙m−x˙a)+ka(xm−xa)=f(t){displaystyle m_{m}{ddot {x}}_{m}+c_{m}{dot {x}}_{m}+k_{m}x_{m}+c_{a}({dot {x}}_{m}-{dot {x}}_{a})+k_{a}(x_{m}-x_{a})=f(t)}
- max¨a+ca(x˙a−x˙m)+ka(xa−xm)=0{displaystyle m_{a}{ddot {x}}_{a}+c_{a}({dot {x}}_{a}-{dot {x}}_{m})+k_{a}(x_{a}-x_{m})=0}

基礎に対して変位励振x0(t)が発生する場合:
- mmx¨m+cm(x˙m−x˙0(t))+km(xm−x0(t))+ca(x˙m−x˙a)+ka(xm−xa)=0{displaystyle m_{m}{ddot {x}}_{m}+c_{m}({dot {x}}_{m}-{dot {x}}_{0}(t))+k_{m}(x_{m}-x_{0}(t))+c_{a}({dot {x}}_{m}-{dot {x}}_{a})+k_{a}(x_{m}-x_{a})=0}
- max¨a+ca(x˙a−x˙m)+ka(xa−xm)=0{displaystyle m_{a}{ddot {x}}_{a}+c_{a}({dot {x}}_{a}-{dot {x}}_{m})+k_{a}(x_{a}-x_{m})=0}

主系に対して力励振f = f0sin(Ωt)が加わる場合は、主系の変位倍率は次のように求まる[20]。
- |Xmxst|=(α2−β2)2+(2ζaαβ)2A2+4B2{displaystyle left|{frac {X_{m}}{x_{st}}}rightvert ={sqrt {frac {(alpha ^{2}-beta ^{2})^{2}+(2zeta _{a}alpha beta )^{2}}{A^{2}+4B^{2}}}}}
- A=β4−{(μ+1)α2+4ζaζmα+1}β2+α2{displaystyle A=beta ^{4}-left{(mu +1)alpha ^{2}+4zeta _{a}zeta _{m}alpha +1right}beta ^{2}+alpha ^{2}}
- B=−{ζm+(μ+1)ζaα}β3+(ζmα+ζa)αβ{displaystyle B=-left{zeta _{m}+(mu +1)zeta _{a}alpha right}beta ^{3}+(zeta _{m}alpha +zeta _{a})alpha beta }



ここで、
- ωa=kama, ωm=kmmm, μ=mamm, α=ωaωm, β=Ωωm{displaystyle omega _{a}={sqrt {frac {k_{a}}{m_{a}}}}, omega _{m}={sqrt {frac {k_{m}}{m_{m}}}}, mu ={frac {m_{a}}{m_{m}}}, alpha ={frac {omega _{a}}{omega _{m}}}, beta ={frac {Omega }{omega _{m}}}}
- cca=2maka, ccm=2mmkm, ζa=cacca, ζm=cmccm, xst=f0km{displaystyle c_{ca}=2{sqrt {m_{a}k_{a}}}, c_{cm}=2{sqrt {m_{m}k_{m}}}, zeta _{a}={frac {c_{a}}{c_{ca}}}, zeta _{m}={frac {c_{m}}{c_{cm}}}, x_{st}={frac {f_{0}}{k_{m}}}}


である。ζm → 0のとき、上記の主系に減衰無しの場合の変位倍率と一致する。
一般に、主系に減衰要素が存在する場合は動吸振器の最適パラメータ(αopt、ζa opt)の厳密解を得ることはできない[18]。また、主系に減衰が存在する場合は共振曲線上の定点が存在しなくなる[21]。このようなモデルの最適パラメータは数値解析により最適値を得る必要があり、多くの研究が行われてきている[3]。
近似式
数値解析結果をもとにした、浅見らによる最適パラメータを求める近似式を以下に示す[22][23]。主系の減衰比ζm < 0.1程度の範囲まで実用的には十分な精度がある[24][25]。減衰付主系のモデルでは定点は存在しないので、ここでいう定点理論による最適値とは、共振点の高さを等しくすることによる最適値という意味である[21]。
ここで、
- ωa=kama, ωm=kmmm, μ=mamm, α=ωaωm{displaystyle omega _{a}={sqrt {frac {k_{a}}{m_{a}}}}, omega _{m}={sqrt {frac {k_{m}}{m_{m}}}}, mu ={frac {m_{a}}{m_{m}}}, alpha ={frac {omega _{a}}{omega _{m}}}}
- cca=2maka, ζa=cacca, ccm=2mmkm, ζm=cmccm{displaystyle c_{ca}=2{sqrt {m_{a}k_{a}}}, zeta _{a}={frac {c_{a}}{c_{ca}}}, c_{cm}=2{sqrt {m_{m}k_{m}}}, zeta _{m}={frac {c_{m}}{c_{cm}}}}


とすれば、
最小分散規範による最適値:[22]
- 主系力加振系(ホワイトノイズ型不規則振動)
- αopt=11+μ1+μ2−ζm(4+μ)μ8(1+μ)3(2+μ)(4+3μ)+ζm2μ(192+304μ+132μ2+13μ3)8(1+μ)2(4+3μ)22(2+μ)3−ζm3b116μ32(1+μ)5(2+μ)5(4+3μ)7{displaystyle {begin{alignedat}{3}alpha _{opt}=&{frac {1}{1+mu }}{sqrt {1+{frac {mu }{2}}}}-zeta _{m}(4+mu ){sqrt {frac {mu }{8(1+mu )^{3}(2+mu )(4+3mu )}}}\&+zeta _{m}^{2}{frac {mu (192+304mu +132mu ^{2}+13mu ^{3})}{8(1+mu )^{2}(4+3mu )^{2}{sqrt {2(2+mu )^{3}}}}}\&-zeta _{m}^{3}{frac {b_{1}}{16}}{sqrt {frac {mu ^{3}}{2(1+mu )^{5}(2+mu )^{5}(4+3mu )^{7}}}}\end{alignedat}}}
- ζa opt=μ(4+3μ)8(1+μ)(2+μ)−ζmμ34(1+μ)(4+3μ)2(2+μ)3+ζm2−64−80μ+15μ3322μ5(1+μ)3(2+μ)5(4+3μ)5+ζm3μ3b232(1+μ)2(4+3μ)42(2+μ)7{displaystyle {begin{alignedat}{3}zeta _{a opt}=&{sqrt {frac {mu (4+3mu )}{8(1+mu )(2+mu )}}}-zeta _{m}{frac {mu ^{3}}{4(1+mu )(4+3mu ){sqrt {2(2+mu )^{3}}}}}\&+zeta _{m}^{2}{frac {-64-80mu +15mu ^{3}}{32}}{sqrt {frac {2mu ^{5}}{(1+mu )^{3}(2+mu )^{5}(4+3mu )^{5}}}}\&+zeta _{m}^{3}{frac {mu ^{3}b_{2}}{32(1+mu )^{2}(4+3mu )^{4}{sqrt {2(2+mu )^{7}}}}}\end{alignedat}}}


ただし、
- b1=4096+13056μ+15360μ2+8080μ3+1780μ4+101μ5{displaystyle b_{1}=4096+13056mu +15360mu ^{2}+8080mu ^{3}+1780mu ^{4}+101mu ^{5}}
- b2=2048+6912μ+8064μ2+3616μ3+288μ4−125μ5{displaystyle b_{2}=2048+6912mu +8064mu ^{2}+3616mu ^{3}+288mu ^{4}-125mu ^{5}}


- 基礎変位加振系(ホワイトノイズ型不規則振動)
- αopt=11+μ1+μ2−ζm(4+μ)μ8(1+μ)3(2+μ)(4+3μ)+ζm2μ(704+1328μ+804μ2+157μ3)8(1+μ)2(4+3μ)22(2+μ)3+ζm3b116μ2(1+μ)5(2+μ)5(4+3μ)7{displaystyle {begin{alignedat}{3}alpha _{opt}=&{frac {1}{1+mu }}{sqrt {1+{frac {mu }{2}}}}-zeta _{m}(4+mu ){sqrt {frac {mu }{8(1+mu )^{3}(2+mu )(4+3mu )}}}\&+zeta _{m}^{2}{frac {mu (704+1328mu +804mu ^{2}+157mu ^{3})}{8(1+mu )^{2}(4+3mu )^{2}{sqrt {2(2+mu )^{3}}}}}\&+zeta _{m}^{3}{frac {b_{1}}{16}}{sqrt {frac {mu }{2(1+mu )^{5}(2+mu )^{5}(4+3mu )^{7}}}}\end{alignedat}}}
- ζa opt=μ(4+3μ)8(1+μ)(2+μ)−ζmμ34(1+μ)(4+3μ)2(2+μ)3+ζm24096+13760μ+18608μ2+12640μ3+4287μ4+576μ5322μ3(1+μ)3(2+μ)5(4+3μ)5+ζm3μ3b232(1+μ)2(4+3μ)42(2+μ)7{displaystyle {begin{alignedat}{3}zeta _{a opt}=&{sqrt {frac {mu (4+3mu )}{8(1+mu )(2+mu )}}}-zeta _{m}{frac {mu ^{3}}{4(1+mu )(4+3mu ){sqrt {2(2+mu )^{3}}}}}\&+zeta _{m}^{2}{frac {4096+13760mu +18608mu ^{2}+12640mu ^{3}+4287mu ^{4}+576mu ^{5}}{32}}{sqrt {frac {2mu ^{3}}{(1+mu )^{3}(2+mu )^{5}(4+3mu )^{5}}}}\&+zeta _{m}^{3}{frac {mu ^{3}b_{2}}{32(1+mu )^{2}(4+3mu )^{4}{sqrt {2(2+mu )^{7}}}}}\end{alignedat}}}


ただし、
- b1=65536+241664μ+369920μ2+305664μ3+148720μ4+43500μ5+7339μ6+576μ7{displaystyle b_{1}=65536+241664mu +369920mu ^{2}+305664mu ^{3}+148720mu ^{4}+43500mu ^{5}+7339mu ^{6}+576mu ^{7}}
- b2=524288+2818048μ+6621184μ2+8864512μ3+7377280μ4+3896224μ5+1271168μ6+233491μ7+18432μ8{displaystyle b_{2}=524288+2818048mu +6621184mu ^{2}+8864512mu ^{3}+7377280mu ^{4}+3896224mu ^{5}+1271168mu ^{6}+233491mu ^{7}+18432mu ^{8}}


定点理論による最適値:[23]
- 主系力加振系(調和振動)
- αopt=11+μ−ζm11+μ12(1+μ)(3+4μ−2(2+μ)(9+4μ)2+μ)+ζm2b0−4(5+2μ)2(2+μ)(9+4μ)4(1+μ)2(2+μ)(9+4μ){displaystyle {begin{alignedat}{2}alpha _{opt}=&{frac {1}{1+mu }}-zeta _{m}{frac {1}{1+mu }}{sqrt {{frac {1}{2(1+mu )}}left(3+4mu -{frac {sqrt {2(2+mu )(9+4mu )}}{2+mu }}right)}}\&+zeta _{m}^{2}{frac {b_{0}-4(5+2mu ){sqrt {2(2+mu )(9+4mu )}}}{4(1+mu )^{2}(2+mu )(9+4mu )}}\end{alignedat}}}
- ζa opt=3μ8(1+μ)+ζm60+63μ+16μ2−2(3+2μ)2(2+μ)(9+4μ)8(1+μ)(2+μ)(9+4μ)+ζm2b1(A+B)2+μ+b2(A−B)μ32(1+μ)(9+4μ)μ(2+μ){displaystyle {begin{alignedat}{2}zeta _{a opt}=&{sqrt {frac {3mu }{8(1+mu )}}}+zeta _{m}{frac {60+63mu +16mu ^{2}-2(3+2mu ){sqrt {2(2+mu )(9+4mu )}}}{8(1+mu )(2+mu )(9+4mu )}}\&+zeta _{m}^{2}{frac {b_{1}(A+B){sqrt {2+mu }}+b_{2}(A-B){sqrt {mu }}}{32(1+mu )(9+4mu ){sqrt {mu (2+mu )}}}}\end{alignedat}}}
- A=3(2+μ)−μ(2+μ){displaystyle A={sqrt {3(2+mu )-{sqrt {mu (2+mu )}}}}}
- B=3(2+μ)+μ(2+μ){displaystyle B={sqrt {3(2+mu )+{sqrt {mu (2+mu )}}}}}




ただし、
- b0=52+41μ+8μ2{displaystyle b_{0}=52+41mu +8mu ^{2}}
- b1=−1296+2124μ+6509μ2+5024μ3+1616μ4+192μ5{displaystyle b_{1}=-1296+2124mu +6509mu ^{2}+5024mu ^{3}+1616mu ^{4}+192mu ^{5}}
- b2=48168+112887μ+105907μ2+49664μ3+11632μ4+1088μ5{displaystyle b_{2}=48168+112887mu +105907mu ^{2}+49664mu ^{3}+11632mu ^{4}+1088mu ^{5}}



- 基礎変位加振系(調和振動)
αoptとζa optの式は、上記の主系力加振系と同形式である。ただし係数は以下のように変わる。
- b0=52+113μ+76μ2+16μ3{displaystyle b_{0}=52+113mu +76mu ^{2}+16mu ^{3}}
- b1=−1296+2124μ+7157μ2+5924μ3+2032μ4+256μ5{displaystyle b_{1}=-1296+2124mu +7157mu ^{2}+5924mu ^{3}+2032mu ^{4}+256mu ^{5}}
- b2=48168+105111μ+91867μ2+40172μ3+8784μ4+768μ5{displaystyle b_{2}=48168+105111mu +91867mu ^{2}+40172mu ^{3}+8784mu ^{4}+768mu ^{5}}



動吸振器の種類

イングランド、ストックトン=オン=ティーズのインフィニティ橋(en:Infinity Bridge)に設置されている同調質量ダンパ

ミレニアム・ブリッジ (ロンドン)に設置されている同調質量ダンパ

台湾の台北101に設置されている振り子型同調質量ダンパ
以下に、派生形も含めた動吸振器の種類を示す。ここでは、補助質量体により対象物の振動を抑制・吸収する装置を動吸振器の定義としているが、バネのような復元力要素を持つもののみを動吸振器に分ける場合もある[26]。
同調質量ダンパ
固体質量体を用いた最も基本的な動吸振器で、上記で基本原理を説明しているものと同じである。動吸振器と同義の場合もあるが、同調質量ダンパ、チューンドマスダンパ (en:Tuned mass damper、TMD) 、質量ダンパ、マスダンパ (Mass Damper) などと呼ばれる。特に土木・建築分野ではこちらの名称で呼ばれる[27]。バネの代わりに振り子や倒立振子機構にすることで復元力を得るもの、従系質量体を1つと限らずに複数備えるもの、振動方向が上下あるいは水平に対応するものなどがある。
建築分野では、超高層建築物に対して風による揺れが問題になることから制振装置として採用される[28]。世界で最初期に同調質量ダンパが導入されたのは、アメリカのシティグループ・センターとジョン・ハンコック・タワーで、どちらも構造エンジニアのウィリアム・ルメジャー (en:William LeMessurier) の設計によるものである[29]。
2007年現在において、世界で最重量の同調質量ダンパは、台湾の台北101に設置されている730tonの振り子型同調質量ダンパである[30]。
日本では、千葉ポートタワーのものが高層建築物に対する初の採用である[31]。
自動車にも採用されており、2006年のフォーミュラ1では、エアロダイナミクスの効果を高めるために車体の前端にマスダンパを装備して車体の安定性を向上させたフォーミュラ1カーが使用された[32]。ルノー・R26なども参照。
同調液体ダンパ(スロッシングダンパ)
同調液体ダンパ、あるいはスロッシングダンパ(tuned sloshing damper)とは、液体のスロッシング現象を利用して振動を抑制するもので、建物などの制振に利用される。スロッシングの固有振動数と建物の固有振動数を同調させることで効果を発揮する。スロッシングの固有振動数の固有振動数は、液体を入れる水槽の大きさ、水深などにより決定される。日本では、神奈川県横浜市の新横浜プリンスホテル、北海道函館市の五稜郭タワーなどで利用されている[33]。
フードダンパ
フードダンパ(houdaille damper, houde damper)とは、質量と減衰器からなる動吸振器で、通常のものからバネ要素を無くした構造が特徴である[34]。バネが無く固有振動数が存在しないため同調の必要がない利点がある。ただし、同調型の動吸振器よりも振動抑制の効果は小さい[35]。回転機械のねじり振動の防止[34]、プラント配管の振動抑制[35]などに使用されている[36]。元々は、下記のランチェスタダンパと同様、往復内燃機関クランクシャフト用のねじり振動低減用として考案されたものである[36]。
ランチェスターダンパ(摩擦ダンパ)
ランチェスターダンパ(Lanchester damper)とは、フードダンパにおける減衰要素を摩擦要素で置き換えたもの[37]。元々はフレデリック・ランチェスターにより往復内燃機関のクランクシャフト用として発明されたもので、ランチェスターダンパとはそのような構造・用途に限って意味する場合もある[38]。そのため単に摩擦ダンパなどとも呼ぶ[39][40]。
インパクトダンパ(衝撃ダンパ)
インパクトダンパ(impact damper)とは、制振対象に衝突体を入れた容器を取り付け、さらに容器内の振動方向に隙間を設けることで、対象物振動時に衝突が発生して対象物の振動を抑制するものである[41][26]。原理的には、対象物の運動量を衝突により補助質量体へ移動させて対象物の運動を抑制し、移った補助質量体の運動量は摩擦などで散逸させる仕組みを取る[42]。補助質量体である衝突体には多数の球体など利用する場合が多い[40]。
動力付き自動車模型のミニ四駆では、コースアップダウンセクション通過によるジャンプから着地時の車体の上下動安定を目的とした「マスダンパー」と呼ばれる改造部品がある[43]。構造的には補助質量体との衝突を原理とするインパクトダンパに近い。
アクティブ動吸振器
一般的に指す動吸振器とは受動制振(パッシブ)による振動抑制機構である。すなわち、質量、ばね、減衰器などを取り付けるだけで、制振のために特別にエネルギを外部から入力するようなことは行わない機構である[44]。受動制振型はコスト的メリットがある一方、制振対象の振動特性が明らかでない場合や変動する場合に十分な振動抑制が発揮できない[44]。そのため、ばね、減衰器の代わりにアクチュエータなどを利用して直接的に振動抑制力を与えるのが能動制振型で[1]、アクティブ動吸振器、アクティブマスダンパ(active mass damper, AMD)などとよぶ。例えば、質量体を直接アクチュエータで押し引きして建物の振動抑制を図るものなどがある[45]。
アクティブ式の他に、アクチュエータは使用しない代わりに応答状態に応じて動吸振器の減衰特性を変化させるセミアクティブ式や、アクチュエータとばね・ダンパを併用するハイブリッド式などもある[46][1]。
脚注
- ^ abc機械工学辞典 p.921
^ 振動工学 p.142
- ^ abLiu 2010 p.120
- ^ abcde浅見1995 p.915
^ “耐震構造・制振構造・免震構造”. 日建設計. 2014年5月5日閲覧。
- ^ abcd機械振動学 p.86
^ 振動工学 p.143
^ 機械振動学 p.87
- ^ abc機械振動学 p.89
- ^ abc 振動のダンピング技術 p.53
- ^ ab振動工学 p.150
- ^ abc 振動のダンピング技術 p.54
^ 浅見1993 p.2964
^ 機械振動学 p.91
^ 西原1997 p.3443
^ 西原1997 p.3441
^ Stephen H. Crandall; William D. Mark (1963). Random vibration in mechanical systems. New York : Academic Press. ISBN 9780121967505. http://catalog.hathitrust.org/Record/001512439.
- ^ ab 振動のダンピング技術 p.55
^ 浅見1993 p.2962
^ Liu 2010 p.122
- ^ ab浅見1995 p.916
- ^ ab浅見1993 p.2965
- ^ ab浅見1995 p.919
^ 浅見1993 p.2967
^ 浅見1995 p.920
- ^ ab 制振工学ハンドブック p.75
^ 動吸振器とその応用 p.1
^ 動吸振器とその応用 p.222
^ Introduction to Structural Motion Control pp.222-223
^ Ioannis Kourakis (2007年). “Structural systems and tuned mass dampers of super-tall buildings : case study of Taipei 101”. Massachusetts Institute of Technology. p. 43. 2014年5月11日閲覧。
^ “作品:千葉ポートタワー”. 日建設計. 2014年5月6日閲覧。
^ “Renault R26 - mass damper system”. Formula One Management Limited. 2014年5月13日閲覧。
^ “スーパー・スロッシング・ダンパー製品紹介ページ”. 清水建設. 2014年5月5日閲覧。
- ^ ab機械工学辞典 p.1125
- ^ ab 振動のダンピング技術 p.219
- ^ ab振動工学 p.152
^ 機械工学辞典 p.1350
^ 機械振動学 p.95
^ 機械振動学 p.93
- ^ ab動吸振器とその応用 p.5
^ 機械工学辞典 p.66
^ 制振工学ハンドブック p.81
^ “製品情報:GP.392 マスダンパーセット”. タミヤ. 2014年5月13日閲覧。
- ^ ab機械振動学 p.82
^ “TMD/AMDによる建物の振動対策”. 竹中工務店. 2014年5月5日閲覧。
^ “アクティブ制振技術(ハイブリッドマスダンパー:HMD)”. 前田建設. 2014年5月5日閲覧。
参考文献
- 『機械工学辞典』 日本機械学会、丸善、2007年1月20日、第2版。.mw-parser-output cite.citation{font-style:inherit}.mw-parser-output .citation q{quotes:"""""""'""'"}.mw-parser-output .citation .cs1-lock-free a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .citation .cs1-lock-limited a,.mw-parser-output .citation .cs1-lock-registration a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .citation .cs1-lock-subscription a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration{color:#555}.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration span{border-bottom:1px dotted;cursor:help}.mw-parser-output .cs1-ws-icon a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/4/4c/Wikisource-logo.svg/12px-Wikisource-logo.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output code.cs1-code{color:inherit;background:inherit;border:inherit;padding:inherit}.mw-parser-output .cs1-hidden-error{display:none;font-size:100%}.mw-parser-output .cs1-visible-error{font-size:100%}.mw-parser-output .cs1-maint{display:none;color:#33aa33;margin-left:0.3em}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-format{font-size:95%}.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-left{padding-left:0.2em}.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-right{padding-right:0.2em}
ISBN 978-4-88898-083-8。 - 『制振工学ハンドブック』 制振工学ハンドブック編集委員会、コロナ社、2008年5月13日。
ISBN 978-4-339-04585-7。 - 『振動のダンピング技術』 日本機械学会、養賢堂、1998年9月1日、第1版。
ISBN 4-8425-9816-6。 - 瀬戸一登 『動吸振器とその応用』 コロナ社、2010年8月20日、初版。
ISBN 978-4-339-04607-6。 - 末岡淳男・金光陽一・近藤孝広 『機械振動学』 朝倉書店、2002年6月20日、初版。
ISBN 4-254-23706-5。 - 前澤成一郎 『振動工学』 森北出版、1973年11月20日、第1版。
Jerome J. Connor (2003). Introduction to Structural Motion Control (1st ed.). Prentice Hall. ISBN 0-13-009138-3.
- 西原修、松久寛「動吸振器の最大振幅倍率最小化設計 : 代数的な厳密解の導出」 (pdf) 、『日本機械学会論文集C編』第63巻第614号、1997年10月25日、 3438-3445頁、 ISSN 03875024、 NAID 110002385275。
- 浅見敏彦、桃瀬一成・細川[ヨシ]延「主系の減衰を考慮した動吸振器の設計式について : 最小分散規範に基づく設計法」 (pdf) 、『日本機械学会論文集C編』第59巻第566号、1993年10月25日、 2962-2967頁、 ISSN 03875024、 NAID 110002380702。
- 浅見敏彦、細川[ヨシ]延「主系の減衰を考慮した動吸振器の設計式について : 第2報,定点理論に基づく設計法」 (pdf) 、『日本機械学会論文集C編』第61巻第583号、1995年3月25日、 915-921頁、 ISSN 03875024、 NAID 110002381725。
Kefu Liu; Gianmarc Coppola (2010). “Optimal design of damped dynamic vibration absorber for damped primary systems” (pdf). Trans. Can. Soc. Mech. Eng. 34 (1): 120-135. http://www.tcsme.org/Papers/Vol34/Vol34No1Paper8.pdf.
関連項目
- 振動
- 自由振動
- 強制振動
- 自励振動
- 減衰振動
- 固有振動
- 共振
- ショックアブソーバー
- スカイフック理論
- アクティブサスペンション
外部リンク
事例に学ぶ動力学 - 動吸振器による振動低減(技術者Web学習システム)
アメリカ合衆国特許第989,958号(フラームによる1909年の特許)
屋上の水槽によるスロッシングダンパーの模式アニメーション(アイディールブレーン社スーパー・スロッシング・ダンパー製品紹介ページ)
Tuned Mass Damper - YouTube(Moog CSA Engineering社による同調質量ダンパ説明動画)


